Tips/ Mengenal Motor Stepper : Pengertian, Cara Kerja dan Jenisnya
Apa itu motor Stepper ? Motor stepper merupakan salah satu jenis motor yang kini banyak digunakan. Misalnya saja pada printer 3D dan mesin CNC Engraving.
Jika diperhatikan, motor stepper memiliki beberapa berbedaan, khususnya pada terminal inputnya. Jika biasanya motor DC hanya memiliki 2 input dan motor Servo punya 3 input, maka motor stepper memiliki 4 atau 5 input..
Pada artikel ini kita akan mengupas tentang tentang pengertian motor DC, Konstruksi motor ini, Jenis-jenisnya, Cara kerja motor serta Aplikasi dan penerapannya.
Daftar isi
- 1. Pengertian Motor Stepper
- 2. Konstruksi Motor Stepper
- 3. Jenis Motor Stepper
- 3.1. Berdasarkan Struktur Rotor-Stator
- 3.1.1. Variable Reluctance
- 3.1.2. Permanent Magnet
- 3.1.3. Hybrid
- 3.2. Berdasarkan Lilitan Stator
- 3.2.1. Stepper Unipolar
- 3.2.2. Stepper Bipolar
- 3.1. Berdasarkan Struktur Rotor-Stator
- 4. Cara Kerja Stepper
- 5. Metode Pengendalalian Stepper
- 6. Kelebihan Motor Stepper
- 7. Aplikasi dan Penerapan
Pengertian Motor Stepper
Seperti namanya, motor Stepper merupakan jenis motor yang putarannya berdasarkan langkah (step) diskrit. Input pada motor stepper berasal dari pulsa-pulsa digital, berdeda dengan motor DC konvensional yang bekerja berdasarkan komutasi pada komponen brush (sikat) nya.

Step yang mengendalikan motor berasal dari konstruksi kumparan yang disusun menjadi beberapa kelompok yang disebut fase. Motor dapat berputar apabila diberikan energi pada fase secara berurutan.
Motor Stepper mengganti sinyal-sinyal listrik menjadi gerakan mekanis diskrit. Motor Stepper bergerak dalam langkah (step) secara teratur. Anda dapat mengendalikan langkah pada motor mengunakan mikrokontroller maupun rangkaian digital.
Torsi dari motor Stepper tidak sebesar motor DC. Namun, motor jenis ini memiliki tingkat presisi yang tinggi dalam putarannya. Kecepatan gerak pada stepper dinyatakan dalam step per second atau jumlah step per detik.
Konstruksi Motor Stepper
Pada dasarnya, motor stepper memiliki konstruksi yang sama dengan motor listrik pada umumnya, yaitu memiliki rotor dan stator. Perbedaanya merupakan motor stepper tidak memiliki sikat karena putaran dilakukan dengan memberikan pulsa diskrit pada kumparan motor.
 |
| Konstruksi motor stepper (sumber : electricaltechnology.org) |
Stator pada motor DC terbuat dari logam yang terdapat belitan di sekelilingnya. Belitan ini tidak dililitkan pada seluruh untukan stator, namun dibelitkan secara individual pada gigi stator, sehingga lebih mirip motor brushless. Belitan inilah yang terhubung pada input dan diberikan pulsa digital.
Sedangkan rotor pada stepper terbuat dari besi lunak atau dari batang magnet. Rotor akan merespon medan magnet pada belitan stator dan bergerak sesuai sudut stepnya. Motor Stepper dapat diatur posisinya tanpa mekanisme umpan balik (feedback).
Jenis Motor Stepper
Motor stepper memiliki beberapa gategori. Berdasarkan struktur rotor dan statornya, motor stepper terdiri atas 3 jenis umum yaitu :
1. Variable Reluctance (VR)
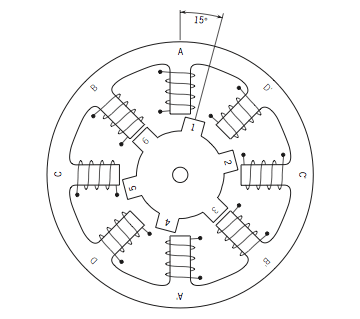
Stepper jenis ini merupakan jenis yang paling sederhana. Motor Stepper VR terdiri dari motor besi lunak dengan beberapa gerigi dan dikelilingi oleh belitan stator.
Stator sendiri terdiri dari beberapa belitan yang terhubung langsung dengan inputnya. Belitan inilah yang menentukan sudut step pada motor.
Rotasi pada motor terjadi ketika gerigi rotor ditarik ke kutub stator akibat dari pulsa digital yang diberikan. Pulsa digital membawa daya listrik sehingga menimbulkan medan elektromagnetik pada kumparan stator.
 |
| Stepper VR (sumber : motioncontroltips.com) |
Magnet pada Stepper tipe VR lebih kecil dan ringan daripada jenis permanen magnet, sehingga dapat bergerak lebig cepat. Semakinkecil gap antara rotor dan gigi stator dari stepper VR, maka semakin kecil pula gaya magnetnya.
2. Permanen Magnet (PM)
Stepper ini menggunakan magnet permanen pada rotornya dan bekerja pada atrikan atau tolakan antara rotor dan stator electromagnet. Tidak seperti tipe Variable Reluctance, tipe Permanen Magnet tidak memiliki gerigi pada rotornya.
Sebagai gantinya, Stepper PM menggunakan magnet dengan alternating north dan kutub selatan dengan garis lurus yang sejajar dengan poros rotor. Kutub magnet pada rotor ini menghasilkan peningkatan intensitas fluks sehingga torsinya lebih tinggi dibandingkan stepper tipe VR.
 |
| Stepper PM (Sumber : linearmotiontips.com) |
3. Stepper Hybrid
Stepper Hybrid merupakan gabungan dari dua jenis stepper diatas. Penggabungan jenis Variable Reluctance dan Permanen magnet bertujuan untuk memberikan daya maksimum dalam kemasan yang kecil.
Karena konstruksi yang digabungkan maka harga dari stepper Hybrid lebih malah dari dua jenis yang lain. Namun, Stepper ini memiliki kombinasi sifat terbaik dari keduanya.
Jenis Hybrid memberikan kinerja yang lebih baik dalam hal tingkat resolusi, torsi dan kecepatan. Rotor dari Stepper ini memiliki multi-gerigi seperti tipe VR dan berisi magnet konsentrik aksial disekitar porosya.
 |
| Stepper Hybrid (sumber : motioncontroltips.com) |
Stepper ini dapat menghasilkan sudut step yang tinggi, antara 3.6� hingga 0.9� per step. Artinya, diperlukan 100 hingga 400 langkah untuk setiap putaran penuh pada motor.
Berdasarkan sitem lilitan pada statornya, stepper diuntuk menjadi dua jenis utama yaitu :
1. Stepper Unipolar
Stepper jenis ini terdiri dari dua lilitan yang memiliki cabang tengah atau center tap. Cabang tengah dari masing-masing lilitan terdapat bersatu ataupun terpisah, tergantung dari datasheet motor.
Biasanya yang dijumpai merupakan stepper unipolar dengan cabang tengah yang disatukan sehingga terdapat 5 input.
Cabang tengah pada stepper ini dapat dihubungkan dengan ground atau ke VCC, tergantung dari spesifikasi pada datasheet motor dan driver yang digunakan .
2. Stepper Bipolar
Stepper bipolar tidak memiliki cabang tengah (center tap). Jenis ini memiliki kelebihan yakni torsi yang lebih besar apabila dibandingkan dengan unipolar dengan ukuran yang sama.
Motor stepper bipolar hanya memiliki empat buah input. Namun demikian untuk mengontrol motor jenis ini lebih rumit dibandingkan motor jenis bipolar.
Untuk mengontrol stepper bipolar,diperlukan sinyal digital yang berubah-ubah dari positif ke negative dan sebaliknya pada setiap lilitannya. Hal ini bertujuan untuk menghasilkan fluktuasi magnetik yang berubah ubah sehingga rotor dapat berputar sesuai sudut stepnya.

Cara Kerja Motor Stepper
Pada dasarnya, cara kerja motor stepper berbeda beda, tergantung pada konstruksi rotor dan stator serta sistem lilitan pada statornya. Namun setiap stepper digerakkan oleh pulsa digital yang diubah setiap waktu.
Kecepatan sinyal pulsa digital atau lebih tepatnya frekuensi sinyal mempengaruhi kecepatannya. Semakin cepat frekuensi sinyal, maka semakin cepat pula RPM pada stepper.
Sinyal digital ini dapat pula digunakan untuk menentukan posisi pada motor stepper. Misalnya saja, stepper dengan sudut step 1.8� maka untuk satu putaran penuh diperlukan 200 step, sehingga untuk setengah putaran stepper memerlukan 100 step dan untuk satu setengah putaran diperlukan 300 step. Hal inilah yang mejadikan stepper banyak dipakai pada mesin printer 3D dan CNC Engraving.
Sinyal digital yang diberikan pada rotor menghasilkan medan magnetik yang berinteraksi dengan rotor pada motor stepper. Hal ini menyebabkan motor bergerak dalam satu sudut stepnya, dan bertahan sampai sinyal digital berikutnya.
Metode Pengendalian Motor Stepper
Motor stepper mengganti sinyal elektronik menjadi gerakan mekanis setiap kali pulsa digital diberikan pada input. Setiap sinyal menggerakkan setiap step secara teratur.
Seperti yang dijelaskan diatas, Apabila pada spesifikasi stepper tercantum sudut step 1.8� maka untuk satu putaran penuh diperlukan 360/1.8=200 step.
Untuk menggerakkan setiap step pada stepper ada beberapa metode yang dapat dilakukan, diantaranya merupakan :
1. Full step
Pada metode full step, motor beroperasi hanya dengan satu fase berenergi pada satu waktu. Pada metode full step belitan yang aktif hanya satu. Namun, dapat pula mengaktifkan dua belitan untuk torsi yang lebih besar.
Full step memberikan putaran motor yang lebih kasar dibandingkan dengan half step. Namun, Metode ini membutuhkan daya yang paling sedikit dari driver. Contoh sinyal input pada full step dapat dilihat pada gambar dibawah
 |
| Full Step digital input |
2. Half step
Metode Half step menggunakan belitan ganda untuk pengoprasiannya. Metode ini merupakan kombinasi dari satu fase dan dua fase pada metode full step.
Sudut langkah yang dihasilkan akan lebih kecil, sehingga menghasilkan putaran yang lebih halus. Contoh sinyal input pada half step padat dilihat pada gambar dibawah
 |
| Half Step digital input |
Kelebihan Motor Stepper
- Sudut rotasi motor sebanding dengan pulsa input.
- Variasi kecepatan rotasi dapat dilakukan karena kecepatan sebanding dengan frekuensi pulsa input.
- Kontrol loop terbuka membuat motor lebih sederhana dan lebih mudah dalam pengontrolan.
- Motor memiliki full torsi standstill.
- Respons yang sangat baik untuk start, stop dan reverse.
- Sangat handal karena tidak ada brushes (sikat) kontak di motor.
- Dapat digunakan untuk mencapai rotasi sinkron kecepatan rendah dengan beban yang langsung digabungkan ke poros motor.
Aplikasi dan Penerapan
- Peralatan 3D printing
- Roll Printing
- Konsol Gaming
- Aktuator robotik
- Mesin CNC milling
- Mesin Welding
- Medical imaging
- Mesin Textile